UT EECS · KEEN AwardUniversity of Toledo EECS·KEEN Award Winner
RC Trailer Jack
A smartphone-controlled trailer wheel system that replaces manual cranking with BLE motor control, live camera feedback, and safety-first embedded logic.
1st
KEEN Award
Competition-winning MVP and project presentation
1 mph
Target Speed
Validated during mock and full-scale trailer testing
~600 lb
Trailer Load Test
Moved a loaded full-scale trailer plus trailer weight
500 ms
Safety Watchdog
ESP32 stops motors if command heartbeat is lost
Project Snapshot
One person, precise control, less strain.
Trailer owners often fight tight spaces, poor visibility, and physically demanding positioning. This prototype turns the trailer jack into a remotely controlled drive system operated from a phone.
The Burden
- Manual trailer positioning is physically demanding and can create injury risk.
- Hitching often requires a second person or repeated back-and-forth vehicle movement.
- Tight spaces, weather, and poor visibility make precise alignment harder.
The Solution
- Smartphone app controls steering, throttle, brake, and gear selection.
- BLE sends low-latency motor commands to a dedicated ESP32 controller.
- A separate ESP32-CAM provides a live rear-view feed for safer maneuvering.
Demo
Watch the prototype move
A short local demo shows the system in action. The full project video is embedded below from YouTube so the site stays fast.
Camera-assisted control
The app combines live camera feedback with hold-to-drive controls, giving the operator steering, throttle, brake, gear, and connection status from a single screen.

Full Project Video
Long-form walkthrough
The long video plays from YouTube so the 541 MB local file does not get bundled into the website. If the inline player is blocked by browser permissions, open the same video directly.
Open on YouTubeInteractive
Try the command loop
Recruiters and students can play with the control idea directly: set gear, steering, throttle, and brake to see the BLE command packet update in real time.
Command Simulator
Try the same control ideas used in the Android app. The packet below mirrors the steering, throttle, gear, and brake fields sent to the motor ESP32.
Current BLE Packet
S:-100;T:18;G:D;B:0Gear
Steering
Throttle
18%Architecture
Two wireless systems, one control loop
Motor control and video streaming are split across dedicated ESP32 systems so command responsiveness stays separate from camera bandwidth.
Android App
Kotlin / Jetpack Compose
Steering, throttle, brake, gear selector, live TX/RX status, camera background, and configuration screen.
Motor ESP32
Validation + PWM/DIR
BLE server, packet validation, single applyState control path, D/R interlock, mutex protection, and safe boot in Park.
Drive Hardware
Driver + dual motors
Cytron SmartDriveDuo drives two 24 VDC geared motors that move the trailer using tank-drive style steering.
Camera ESP32
Wi-Fi AP + MJPEG stream
ESP32-CAM hosts the reverse camera stream at a local Wi-Fi endpoint so the app can show positioning feedback.
Safety Layer
Brake, watchdog, disconnect stop
Command heartbeat, throttle ramping, brake reset, and disconnect detection keep motion deliberate and bounded.


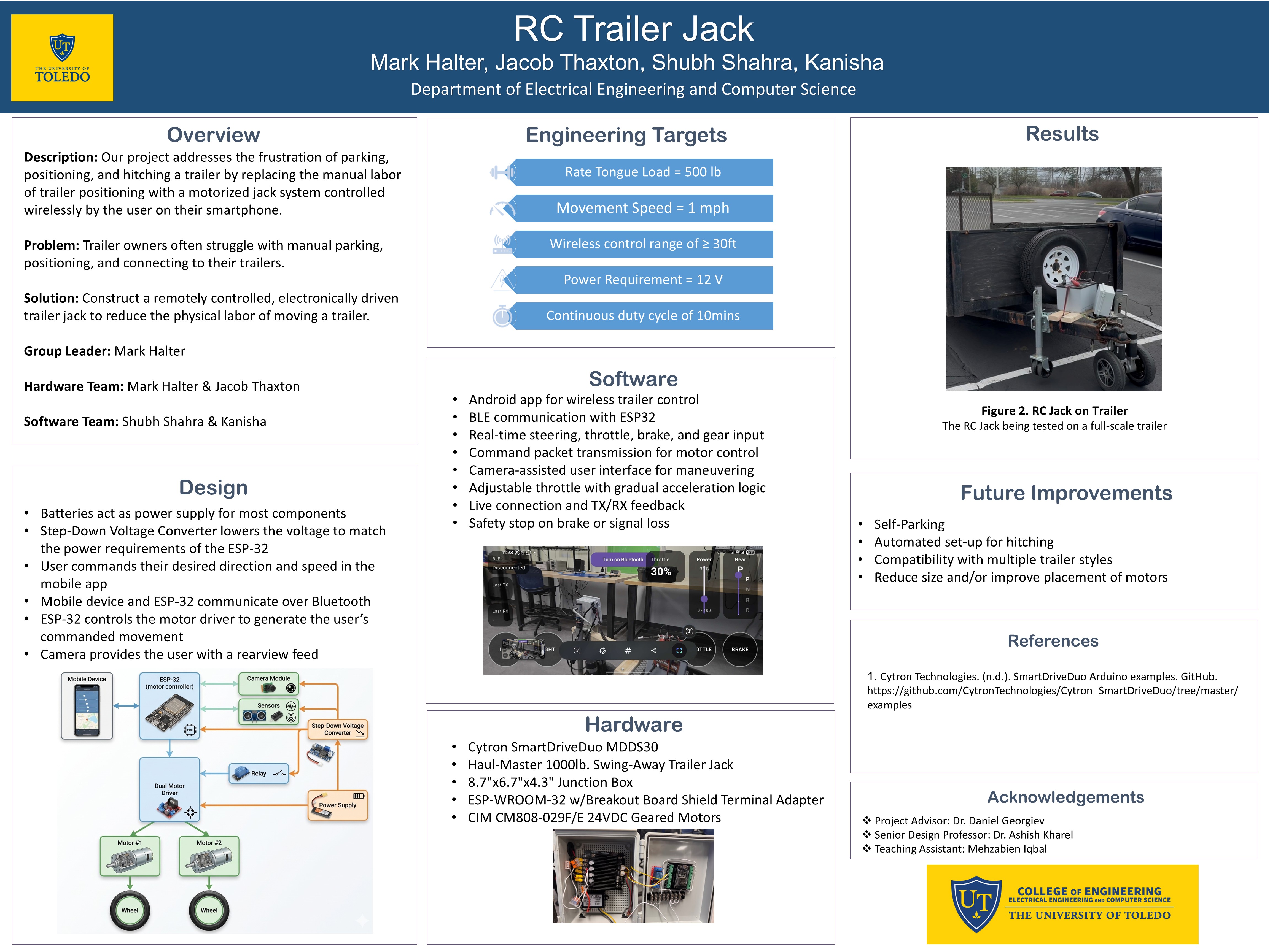
Project Poster
The senior-design story in one slide
The new poster image from `Content/Slide1.JPG` is now featured on the site as the project poster, giving visitors a quick overview of the problem, engineering targets, software, hardware, results, and future work.

Software
Real-time controls with embedded safeguards
The app sends a compact command packet every 200 ms. The ESP32 rejects malformed packets and triggers a safe stop if the command stream goes silent for more than 500 ms.
Android Controller
Kotlin / Jetpack Compose
Hold-to-drive controls, P/N/R/D gear selection, live TX/RX status, and camera background.
BLE Command Link
200 ms heartbeat
Packets use S:<dir>;T:<throttle>;G:<gear>;B:<brake> for steering, throttle, gear, and brake.
Safety Logic
500 ms watchdog
Brake, BLE disconnect, app freeze, or out-of-range behavior all drive the system to a motor stop.
Smooth Drive Feel
Throttle ramp
The app ramps from 8 percent to the target throttle and ramps down on release for controlled motion.
BLE Packet Format
S:<dir>;T:<throttle>;G:<gear>;B:<brake>Hardware
Built from real trailer and motor-control components
The hardware choices balanced load capability, mechanical compatibility, cost, and reliable low-speed movement.
Haul-Master Trailer Jack
Load-bearing frame
A standard swing-away trailer jack gives the prototype a real trailer interface and towing storage position.
CIM 24 VDC Geared Motors
Dual drive actuation
Oversized high-torque motors provide margin for drivetrain losses, starting torque, and surface variation.
Cytron SmartDriveDuo MDDS30
Motor power control
A compact dual-channel driver independently controls both motors with PWM and direction input.
ESP-WROOM-32
Wireless control brain
The ESP32 provides BLE, Wi-Fi capability, flexible I/O, PWM control, and real-time command handling.
24 V Battery System
Motor supply
Two 12 V deep-cycle batteries in series power the motors while a step-down converter feeds the controller.
Weatherproof Enclosure
Electronics protection
The control electronics are mounted in a protected junction box for outdoor senior-design testing.
Testing
Validated on mock and full-scale trailers
The project met the major movement, duty cycle, communication, and compatibility targets, with the 12 V supply target intentionally missed because the team used available 24 V battery hardware.
Success
Move at least 500 lb
The full-scale trailer test moved roughly 600 lb of added load plus trailer weight.
Success
Move at approximately 1 mph
Both mock trailer and full-scale trailer testing reached the desired low-speed motion.
Success
Operate for at least 10 minutes
The hardware met the continuous duty-cycle target during design verification.
Success
Communicate at 30 ft
The smartphone-to-microcontroller wireless control target was met during testing.
Explained miss
Use only 12 VDC supply
The team used available batteries in series for 24 VDC, improving margin while reducing project cost.
Success
Bolt to straight tongue trailers
The prototype uses a standard tongue-style trailer jack interface and can be stored for towing.
What testing proved
The mock trailer showed full maneuverability with roughly 200 lb of added load. The full-scale utility trailer confirmed movement with roughly 600 lb of added load, though its tongue geometry limited maneuverability.
Team
Senior design project with competition impact
Built by Mark Halter, Jacob Thaxton, Shubh Shahra, and Kanisha for EECS senior design at the University of Toledo, advised by Dr. Daniel Georgiev.

University of Toledo EECS
The project integrated electrical engineering, embedded firmware, mobile app development, mechanical prototyping, and practical test planning.
First place KEEN Award
The MVP and presentation earned first place in the KEEN Award competition, emphasizing curiosity, connections, and creating value.
Future Work
Where the prototype goes next
The current system proves remote control and safety behavior. The next iteration would make the unit more compact, more compatible, and more autonomous.
Self-Parking Mode
Use an additional camera and ML model to support automatic trailer positioning.
Auto-Hitch Alignment
Add sensing and control routines to align the trailer with the tow vehicle.
Multi-Trailer Fit
Redesign attachment hardware for broader compatibility across trailer styles.
Compact Powertrain
Reduce battery size and improve horizontal motor placement for packaging.
Documents
Report, slides, and source material
Download the original senior design documents and decks used to present the project.
{kind=link}
JPG
Poster Image
New Slide 1 poster image shown on the website as the project poster.
DOCX
Final Report
Complete senior design report with requirements, design, testing, and references.
Final Presentation
Recruiter-friendly presentation deck covering need, design, testing, and future work.
PPTX
Presentation Source
Editable PowerPoint version of the final senior design presentation.
PPTX
Project Poster
Poster source from the senior design showcase and KEEN competition context.
PPTX
Software Slides
Focused breakdown of the Android, BLE motor ESP32, and ESP32-CAM software system.
PPTX
Competition Deck
Condensed pitch deck for the RC Trailer Jack competition presentation.